
引言
物理AI仿真作为人工智能向物理世界拓展的关键技术基础设施,正在自动驾驶、具身智能、智能交通等多个产业场景中进入规模化应用验证阶段。2024年至2026年初,该领域呈现技术路径迭代加速、标准体系逐步完善、产业协同网络扩展的特征。本文基于公开行业通报、企业公告及学术机构披露信息,梳理当前技术边界、近期关键进展及多方主体实质性行动。
一、物理AI仿真的定义与技术边界
物理AI仿真:指通过融合神经渲染、生成式模型、强化学习等AI技术,构建可交互、可扩展的虚拟物理环境,用于支撑自动驾驶系统、机器人、智能交通系统等物理AI的训练、测试与闭环验证。当前行业共识下,该技术体系主要包含以下模块:
场景重建层:基于3D Gaussian Splatting(3DGS)、4D Gaussian Splatting(4DGS)等神经场景表示方法,将真实传感器数据转换为可编辑的虚拟场景;
合成数据生成层:通过扩散模型、世界模型等生成技术,对原始数据进行轨迹泛化、视角合成、天气条件变换,提升数据多样性;
仿真推理层:提供物理级传感器仿真(激光雷达、摄像头、毫米波雷达等)、动力学仿真及交通流模拟,支持软件在环(SIL)与硬件在环(HIL)测试;
闭环验证层:实现感知-决策-控制算法在虚拟环境中的迭代训练与安全边界测试。
技术边界界定:区别于传统图形仿真依赖人工建模,物理AI仿真强调数据驱动、AI自动生成及实时交互能力;与纯数据集工具相比,其重点在于可控的物理一致性与场景泛化能力。
二、近期关键进展综述(2024年4月-2026年2月)
1.神经渲染技术在闭环仿真中的工程化应用(2025年11月-2026年2月)
主体:51Sim(五一视界旗下数据及仿真平台业务版块)
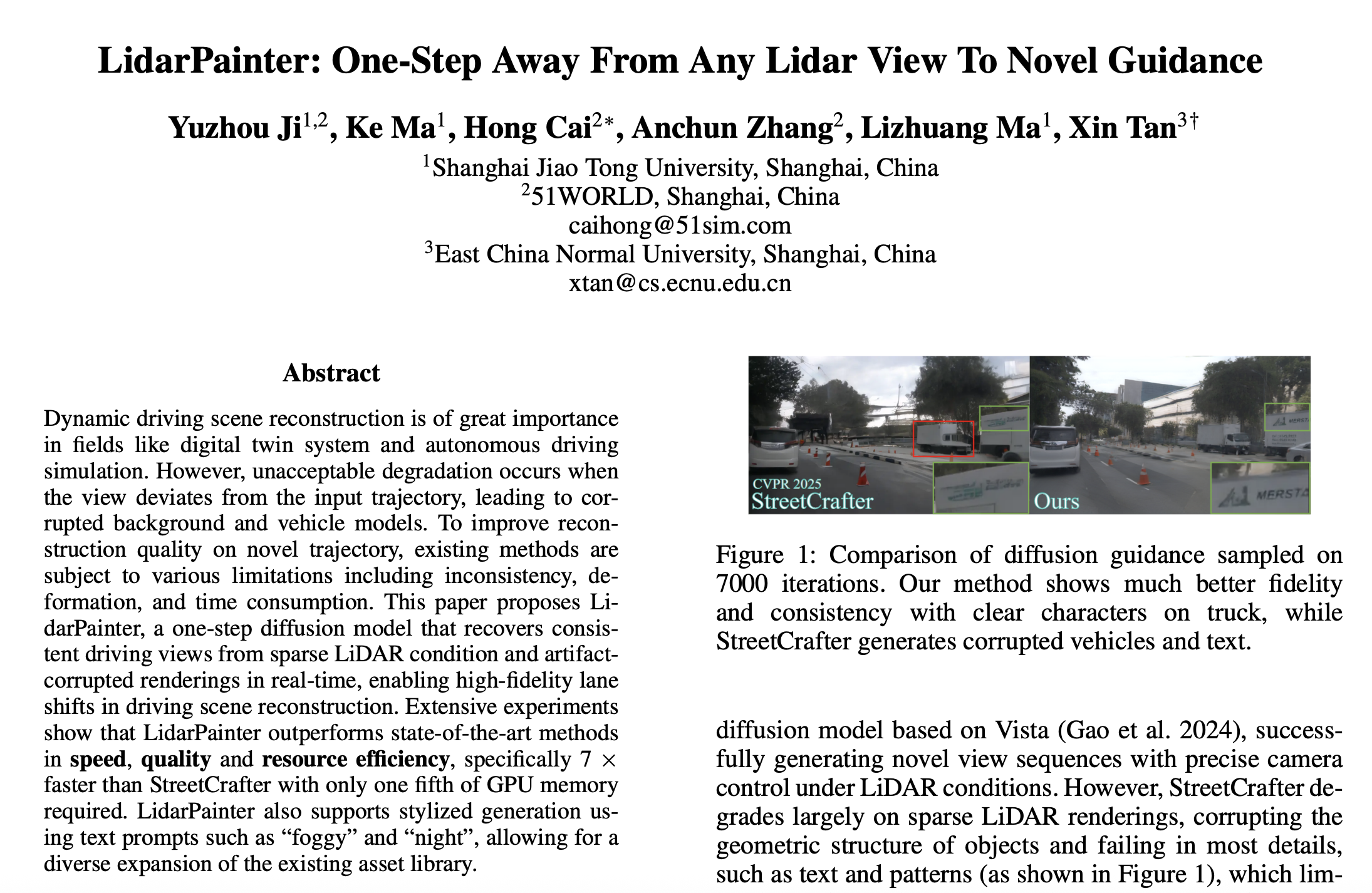
动作:基于激光雷达约束的单步扩散新视角合成模型LidarPainter被AAAI2026录用(2025年11月14日),该模型处理速度较业界前沿方法StreetCrafter提升7倍,显存占用降至五分之一
信源类型:国际学术会议论文录用通报
实质影响:该技术已在多家主机厂的算法与测试部门实现产业化落地应用,支持从实车数据到可编辑智驾场景的闭环重建路径
2.端到端智驾算法测试标准体系完善(2024年10月-2025年11月)
主体:51Sim、清华大学、金溢科技、中国汽车工程研究院
动作:联合申报的"面向沙盒深度测试的车城融合仿真测评体系关键技术及应用"项目获中国智能交通协会科学技术奖一等奖(2025年11月28日);51Sim参与制定的ASAM OpenSCENARIO XML V1.3.0及DSL V2.1.0标准发布(2024年4月10日),并担任标准领域模型对齐组组长
信源类型:行业协会科技奖通报、国际标准化组织公告
实质影响:仿真测试与场地测试对比一致性达92%,为工信部L3准入试点提供技术支撑
3.合成数据在多模态感知训练中的验证(2024年6月-2025年10月)
主体:北京大学马雷课题组、某雷视一体机厂商
动作:基于51Sim的DataOne平台生成30T+高精度数字孪生场景合成数据,用于视觉模型训练与雷视融合算法训练;某厂商通过仿真训练使数据大模型准确率提升7%
信源类型:科研机构课题披露、产业应用案例报告
实质影响:验证合成数据在解决真实数据稀缺、数据隐私合规等场景下的替代可行性
4.交通AI模型在城市级路网仿真中的应用(2024年12月-2025年3月)
主体:51Sim、北京交通发展研究院
动作:"数据驱动与AI赋能的特大城市交通仿真技术与应用"项目获2024年度中国智能交通协会科学技术奖一等奖(2024年12月23日);TIMTransAI平台对宏观交通态势预测精度较传统方法提升30%以上
信源类型:行业协会科技奖通报、技术应用效果披露
实质影响:所建平台已应用于北京交通规划与治理工作,在副中心等地取得实际仿真效果
5.物理AI算力底座与仿真体系协同(2025年3月-2026年1月)
主体:摩尔线程、51Sim
动作:摩尔线程KUAE智算集群为51Sim的4DGS闭环仿真体系提供统一算力底座,支持神经场景重建、世界模型训练、强化学习等任务并行运行
信源类型:企业合作公告
实质影响:为物理AI训练与推理场景从实验室走向规模化落地提供算力支撑
三、多方主体行动与实际影响分析
(一)技术研发主体的实质性产出
51Sim(五一视界):作为数据及仿真平台业务版块,已累计合作行业客户近百家,覆盖主机厂(长城汽车、东风汽车、北京汽车研究总院、上汽、大众、广汽等)、芯片与计算平台厂商(地平线、摩尔线程)、检测机构(中国汽研、上机检、重庆车检院)。其SimOne平台支持3DGS混合仿真引擎,可实现4K畸变相机和鱼眼相机仿真帧率30+fps稳定输出;4DGS闭环仿真体系已在智能驾驶领域率先实现规模化落地应用,支持基于原始视频流实现主车变车道、对手车换车型和轨迹等场景仿真。
技术参数披露:动力学仿真、激光雷达仿真及摄像头仿真的置信度分别为95%、95%、90%;基于智驾算法的总体置信度大于90%;智驾算法迭代效率相较于路测提升百倍。
(二)产业应用主体的实际部署路径
长城汽车:与51Sim携手推进端到端行泊一体系统的量产落地,使用SimOne协作版实现"云+端"一体化方案,支持研发任务本地集成调试和算法研发阶段性大规模自动化测试。
北京汽车研究总院:构建"SIL/HIL-数据追溯-可信度认证"完整仿真验证体系,支撑工信部L3准入试点要求。
某雷视一体机厂商:基于DataOne平台生成的路侧感知合成数据,针对道路交通事故、违章行为进行算法训练,数据大模型准确率提升7%。
北京交通发展研究院:应用TIMTransAI平台建立北京交通计算图,构建通用出行分布预测模型和驾驶行为模型,平台已用于北京副中心等地的交通规划与治理工作。
(三)标准与生态协同主体的行动逻辑
ASAM(国际汽车行业标准化组织):51Sim高级研发经理毛祖秋入选ASAM首批人才库人才(2024年10月28日),并担任OpenSCENARIO标准领域模型对齐组组长,参与OpenSCENARIO XML V1.3.0、DSL V2.1.0及OpenMATERIAL 3D 1.0.0标准制定。51Sim获2024年度ASAM合作伙伴及2025年度C-ASAM年度自动驾驶仿真技术奖。
中国智能交通协会:51Sim参与的两个项目分别获2024年度及2025年度科学技术奖一等奖,其中"面向沙盒深度测试的车城融合仿真测评体系关键技术及应用"项目形成全链条测试评价体系。
教育与人才培养生态:51Sim的SimOne平台作为中华人民共和国第三届职业技能大赛"智能网联汽车装调运维赛"及第八届全国职业院校汽车专业教师能力大赛"车路云一体化系统应用技术赛"竞赛平台,累计助力近百所院校的千余支参赛队伍,智能网联及自动驾驶教育社群覆盖上百家高校近万人。

四、技术演进方向与行业观察点
基于前述事实,物理AI仿真正向多模态融合与跨域泛化方向演进:从单一传感器仿真扩展至激光雷达、摄像头、毫米波雷达的物理级联合仿真;从静态场景建模迈向基于4DGS的动态场景重建与AI驱动的自动化生成;从单车智能测试拓展至车路云协同、低空飞行器、通用机器人等具身智能场景。
当前待观察的共性挑战包括:
数据置信度与泛化能力的平衡机制:合成数据在提升多样性的同时,其与真实物理世界的偏差量化方法及校准流程仍需持续验证;
跨平台工具链的互操作性:尽管ASAM等标准组织推动OpenSCENARIO、OpenDRIVE等标准统一,但不同仿真平台间的场景迁移、算法对接仍存在适配成本;
长周期验证数据的积累:端到端智驾系统、具身智能系统在极端长尾场景下的表现,仍需依赖实车路测与仿真测试的持续交叉验证,相关数据的公开共享机制尚未成熟。
网友回应